Triumph electronics
Engineering design and construction by Ryan Janzen
The Triumph land mine rover successfully carried out its mission on a simulated mine field in a March 2003 demonstration. It autonomously navigated the field, searching out and marking metal deposits on the ground.
In under 8 months, on deadline, the Triumph project was completed. The team was able develop a working solution, satisfying the RFP given by the Engineering Science design project. The solution was a Tricycle-type rover with 3 fixed flag dispensers that would sweep a 19.5’ x 13.3’ field. With a specific design philosophy in mind, the team was powered to begin programming PIC assembly code, etching PCBs, and machining the craft body. By January the individual subsystems were completed and ready for system integration. In various stages of development, Triumph was the first of the competing design teams to reach its milestones. In early February, Triumph was a fully autonomous system, ready for testing before the public demonstration on March 18th, 2003.
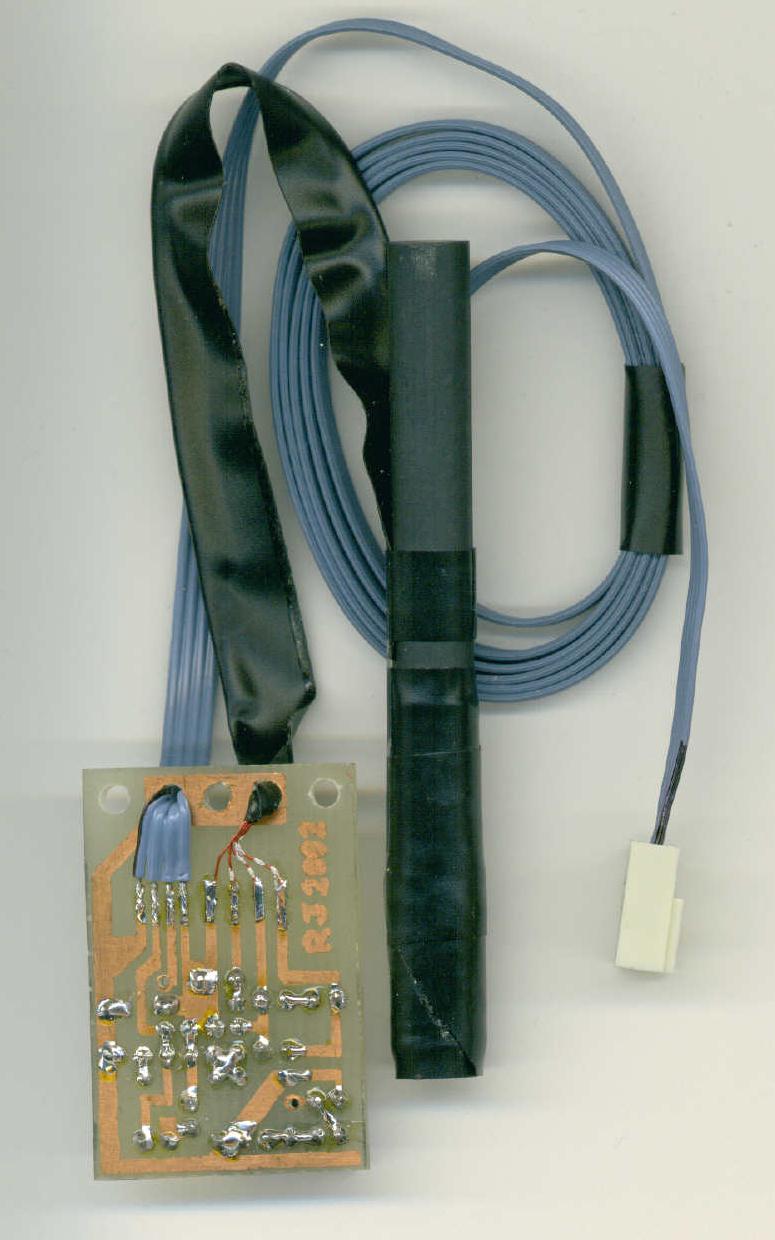
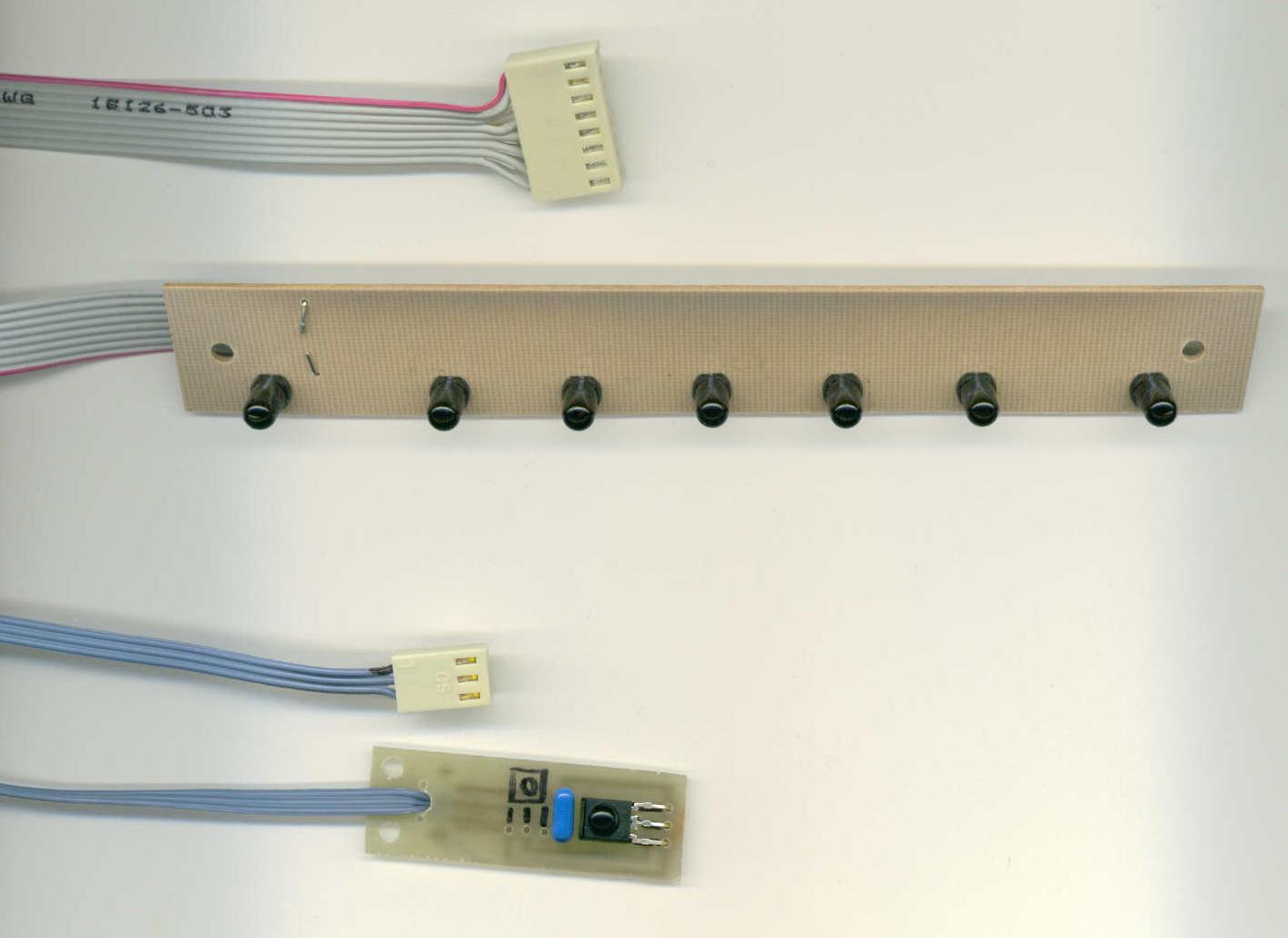
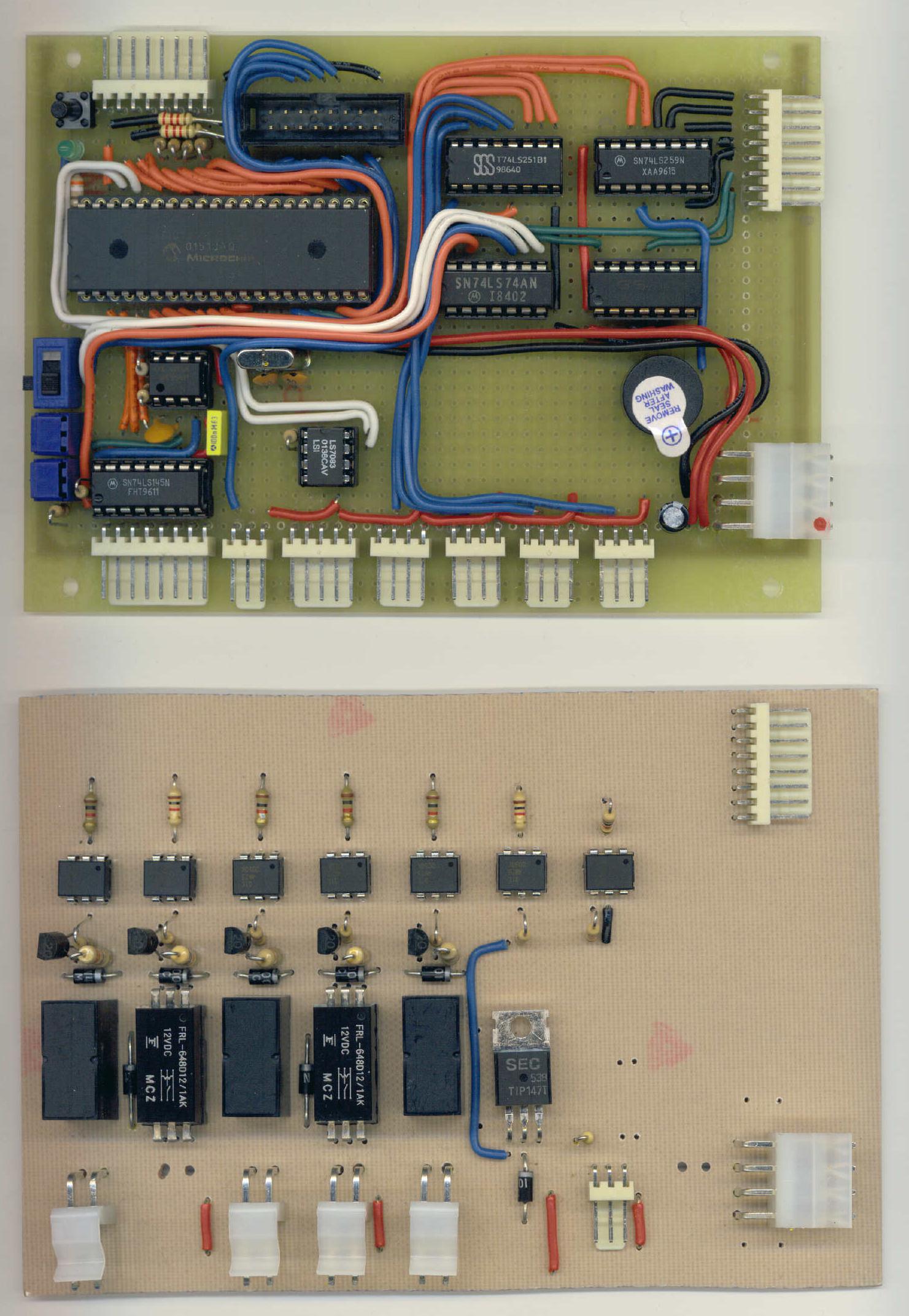
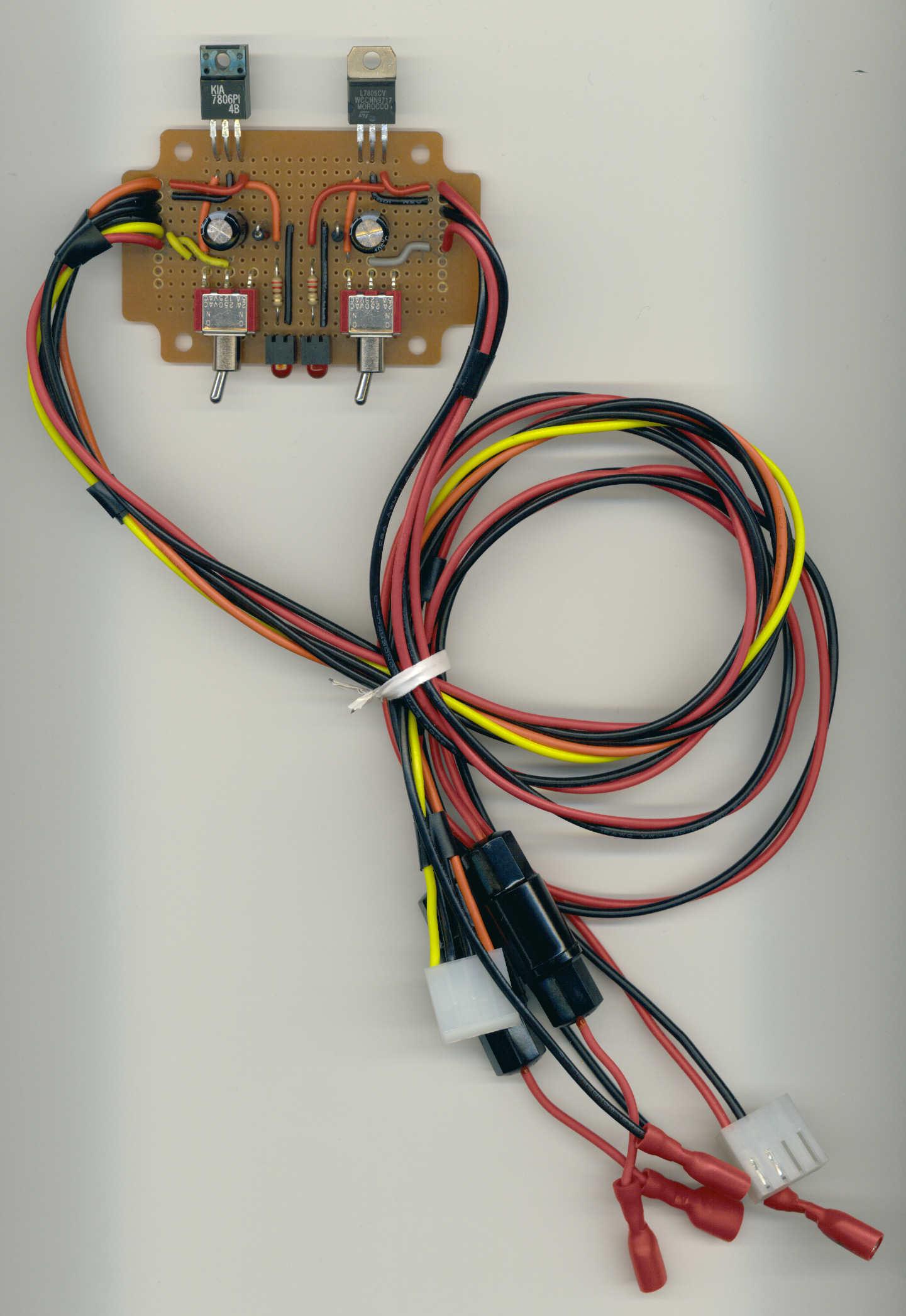
Circuits conceptualized, designed and completed by Ryan Janzen, and integrated in the Rover:
 |  |
| Testing prototype circuits | Soldering |
The finished elements of the electronic system. Click on each image to see the high-resolution photo.