|
|
|
|
1. Mechanical causes of
neurulation
|
|
|
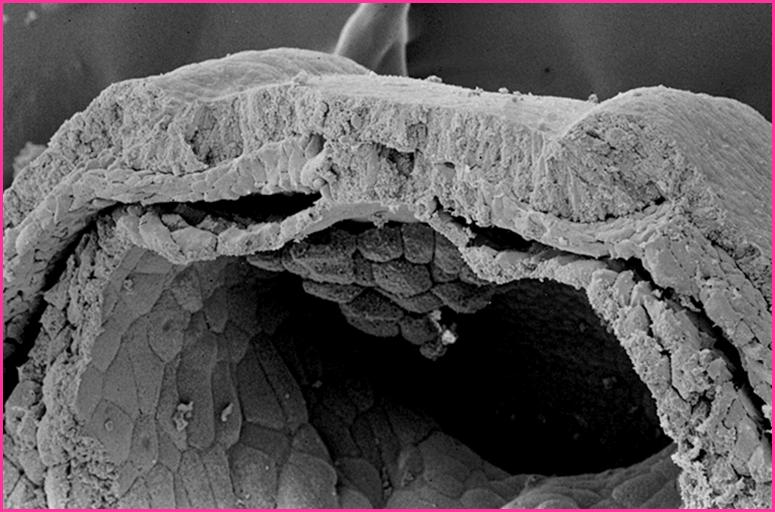
Neurulation
is the formation of the neural tube by closure of the neural plate,
which is directed by the underlying notochord. It goes through four
temporary stages:
(1) Formation of the neural plate (2) Shaping of the neural plate (3) Bending of the neural plate to form neural groove (4) Closure of the neural groove to form neural tube During the formation of neural tube, thin, fragile epithelial tissues must undergo precise, self-driven changes of shape. Forces that drive these movements are generated within the embryonic tissue themselves. It is generally accepted that the cytoskeleton and other sub-cellular structural components drive these movements. |
|
(1) Neural plate formation |
|