
SCARA stands for Selective Compliance Assembly Robot Arm. These robotics arms are often used for high speed assembly of circuit boards. SCARA robots usually have four degrees of freedom: rotary joints at the shoulder, elbow and end effecter, and also a linear axis on the end effecter. This does not include the gripper. I have built just a concept of what a Lego SCARA would look like. The Shoulder and elbow joints work, but there is no end effecter. I tested how accurately the robot could move to different positions (hence the green and black plates), but the results were not encouraging. I think it could be improved by using the old style high speed motors coupled with a worm gear drive. This would eliminate some of the backlash since worm gears cannot be backdriven.

|
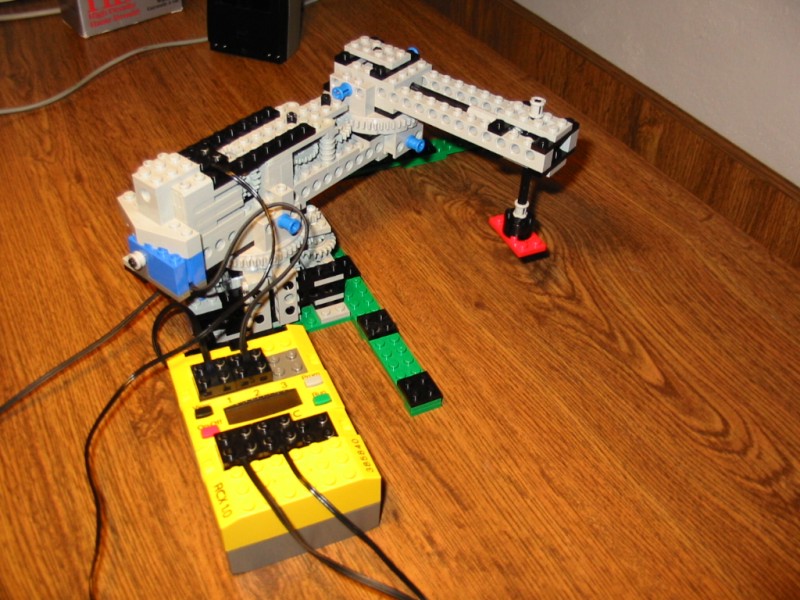
My Lego rendition of a SCARA. I have simplified the design by eliminating the rotary degree of freedom of the gripper. The gripper (the red plate shows where it would be) is geared to the base by means of axles and bevel gears that pass through the arms. With this configuration, the arms can rotate to any position and the gripper remains parallel. |
|
Both shoulder and elbow joint are mounted on large turntables. Each has its own rotation sensor for position feedback. |