This is actually the second colour sorting robot that I have built. The first one was a direct copy of the robot arm in the original control center set (#8094). I just printed the instructions from Brickshelf. It sorted two colours. Unfortunately it was pretty unreliable at finding its home position, because I didn't have any rotation sensors yet. This second rendition was inspired by watching videos of Iain Hendry's cartesian robots in action. I had never built much in the way of linear drives, and it looked like fun.
|
|
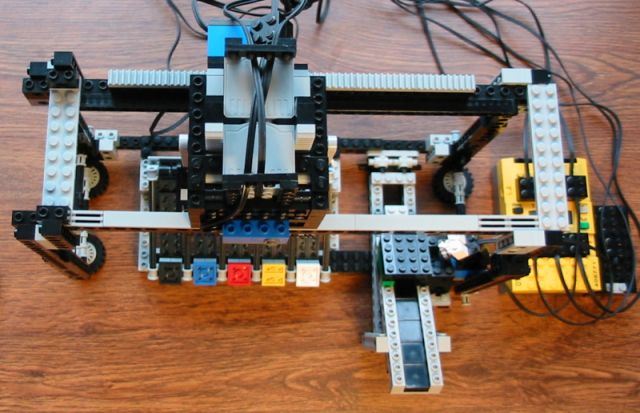
Front view of the colour sorter. It is designed to sort five different colours. |
|
|
Top view. |
|
|
Close up of the feeder. You can see I used green bricks just opposite of the light sensor. When there aren't any blocks in front of the light sensor, it sees the green, which gives a different value than any of the other colours. Also, a light helps give more consistent readings. |
|
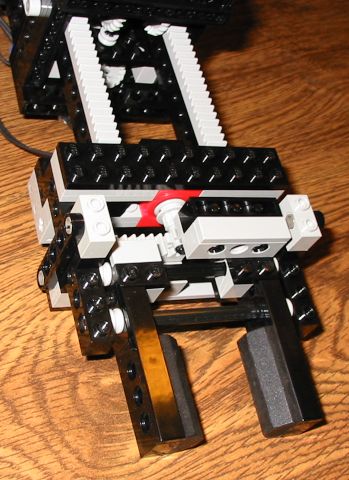
Close up of gripper. The gripper pads are really neat rubber pieces from a hovercraft set that I don't own. Iain lent me these pieces. I am reluctant to give them back :) |
|
|
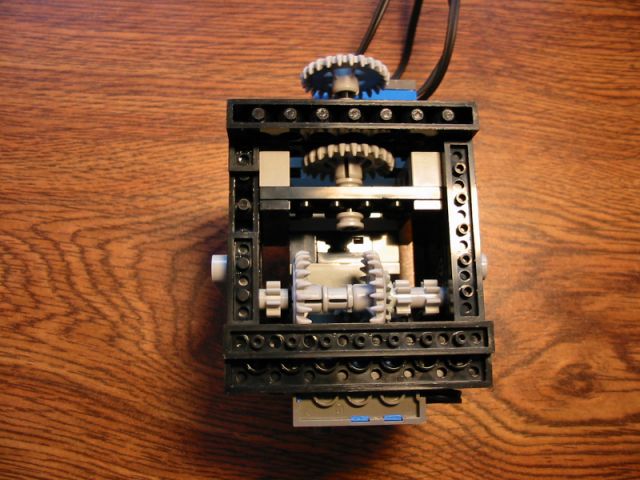
Bottom view of drive unit, showing the gearing. |
The mechanics of this robot work well enough, but the program needs further development. I just recently got the new firmware up and running, and I am planning on using arrays to keep track of the block colours as the are loaded and put away. This is because the light sensor reads the blocks as they pass, and two blocks can be past the sensor at a time. The reason for this is to allow the gripper clearance to pick up the blocks. Currently the robot just sorts one block at a time.