This is the only robot I have built that got a semi original name. Its shaped like a hexagon, and before you know it, its gone! Anyway, this very unconventional robot was built for a local Lego robotics competition on October 13, 2001. The task was to build a robot that could climb underneath the rungs of a horizontal ladder, like monkey bars. The ladder was built using 1/2" copper pipe as the rungs, spaced 6" apart. The object was to get to the other end of the eight foot ladder as fast as possible. Needless to say, this robot was very fast. When we discussed the problem, this was my first idea: make some kind of wheel like robot that can hang underneath the rungs, and 'roll' along across the ladder. I did some geometry calculations, and figured out that a hexagon with 6" sides would have a 12" span from point to point. I thought this perfect geometry would be fairly straight forward to build out of Lego. As it turned out, it was kind of tough to build the hexagon shape, and somehow rigidly connect it to the turntable in the centre. After much trial and error, I decided to use the single bend angle beams for the corners, and connected the turntable with spokes on hinge pieces.
|
|
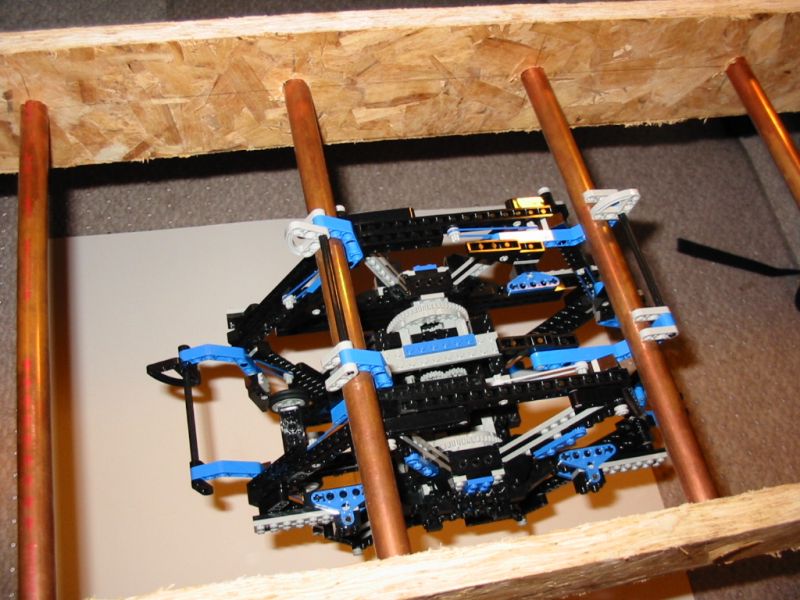
A nice picture at the competition. |
|
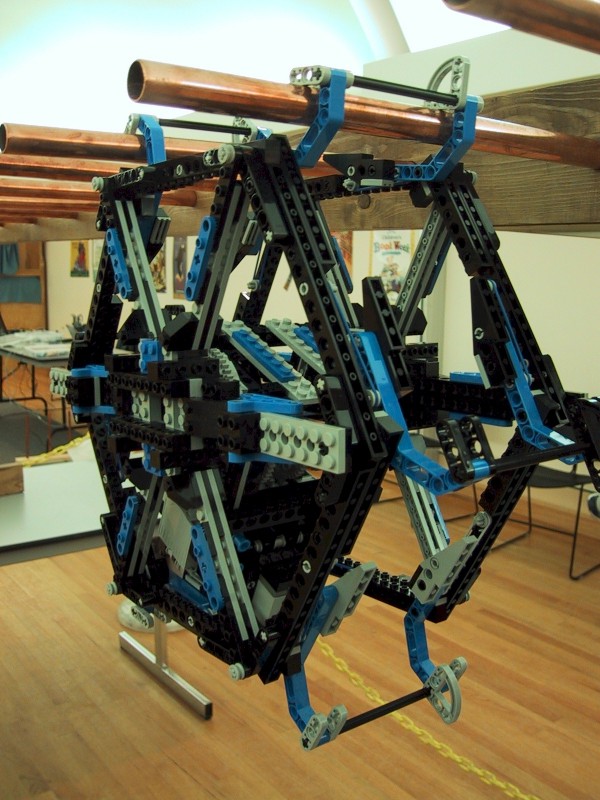
This shot shows the robot on the ladder. It starts with two claws latched on to the rungs. When turned on, the counterweight rotates clockwise to release the back claw. The robot then swings forward. |

|
At the end of the monkey bars, the robot turns itself off. |

|
Close up of one of the claws, showing how the wheels lift the claw to release it from the rung. |
|
|
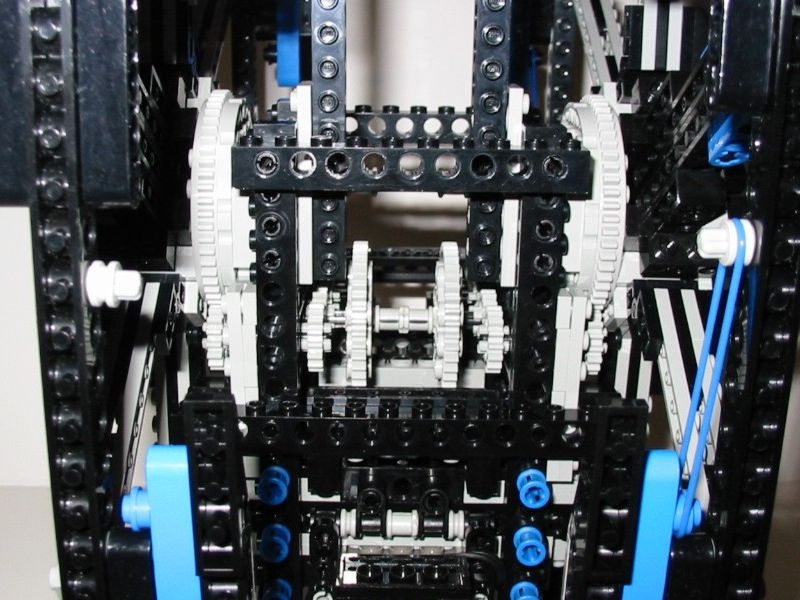
Close up of the gearing. I had originally built the drive train with 52.5:1 gearing, but once the mechanism was working, I sped it up to 17.5:1 (three times faster). The result was astonishing. |
|
|
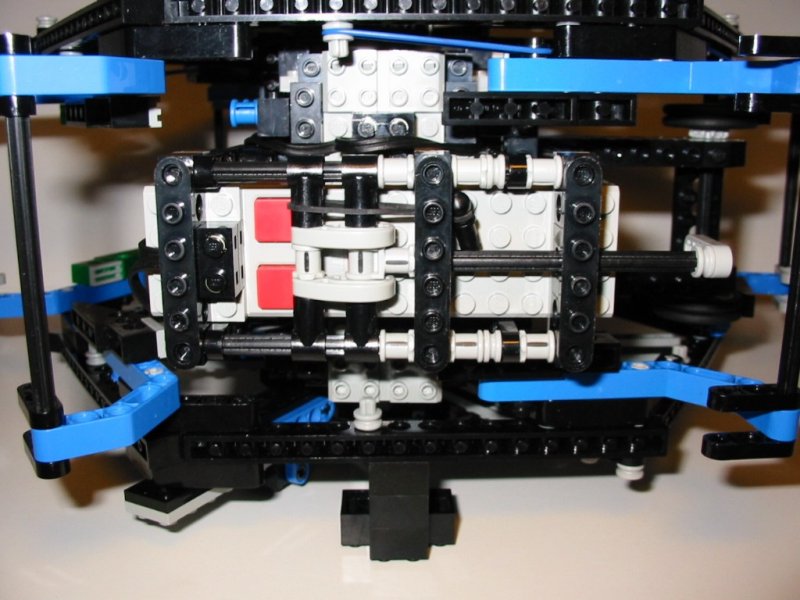
Close up of the battery box. Yup, no RCX here! Since the mechanism did not require logic or sensors, I didn't want to bother with any programming. You just switch it on and watch it go. I did come up with a way for the robot to turn itself off, though. The two cams mounted on the battery box slide along an axle to push the battery box switch, and turn it off. This is triggered by the lift arm at the right end of the axle in this picture. The way it works is that at the last rung, there are no more rungs to latch onto, so the battery box keeps on driving around, and comes up to the rung that the robot is hanging on. The axle is pushed against the rung, which moves the cams in, and turns the battery box off. |
Basically, the way this robot works is as follows: The two hexagon sides are joined to form one big wheel. hanging from inside the wheel is an arm that is geared to the turntables that are fixed to each of the hexagons. Mounted on the arm are three motors and a battery box. The battery box and motors are attached to the rotating arm as far away from the center of the wheel as possible. This is to create a heavy counterweight. Mounted onto the driven arm are two wheels that push up underneath the claws in order to release them. So as these wheels pass underneath one of the claws, it is released. The robot starts with two claws latched on to the ladder rungs. The battery box is then switched on, and the arm starts rotating from the bottom position towards the back end of the robot. As the arm moves up, the wheels release the back claw form its rung. At this point the counterweight is as far away from the second rung as possible, so the robot swings forward with a great deal of momentum. This is enough to latch on to the third rung with a new claw. Now we are back to where we started: two claws latched on, and the centre arm rotating to soon release the back claw. And so the cycle is repeated.
I was very happy with this robot. I spent a lot of time testing and trouble shooting, and it paid off. The end result was a reliable and very fast robot. I suppose the fact that I didn't have to program anything sure acted in my favour. I have always been more mechanically minded, and I was able to approach this monkey bars game with a purely mechanical solution.