The Turtle was, of course inspired by the Logo Turtle that was used in classrooms to teach kids about programming. This simple robot could be programmed to draw shapes on paper by lowering its pen and driving around. I had thought about building this type of robot out of Lego, but there was one major problem. In order to drive in straight lines, the turtle requires two servo motors that can be controlled precisely. Regular Lego motors seldom run at the exact same speed, and so drawing straight lines would be very difficult. An idea for an Adder/Subtracter transmission on Leo Dorst's page really inspired me. This combination of two differentials driven out of phase allows one motor to drive both wheels forward or reverse and the other motor to drive the wheels in opposite directions (turning). Since only one motor does the driving, straight lines are not a problem at all! One other benefit of this transmission is that only one rotation sensor is required to measure both straight driving and turning! (I only realized this after I ordered two of them... duh)
|
|
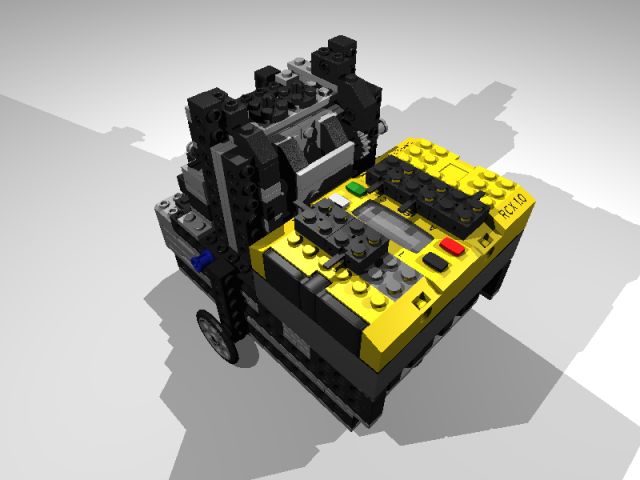
Front left view. The wires show up only a stubs, but the setup is as follows: two gear motors for driving and steering, and one micromotor for lifting and lowering the pen. One touch sensor is used to zero the pen lifter, and one rotation sensor measures the distance driven, and the angles turned. |
|
|
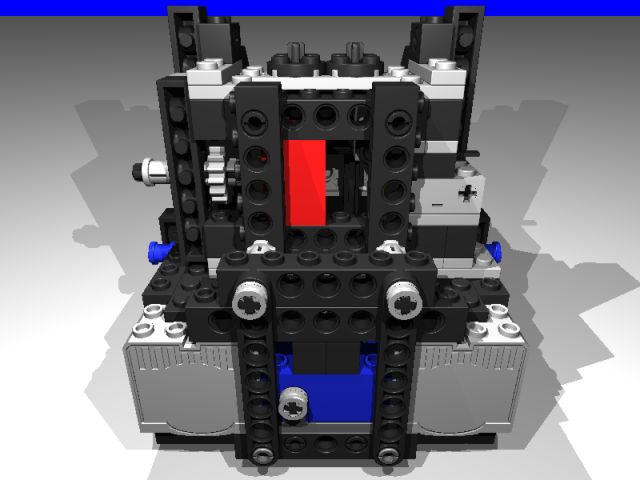
Rear view. The rotation sensor is tucked between the two motors. |
|
|
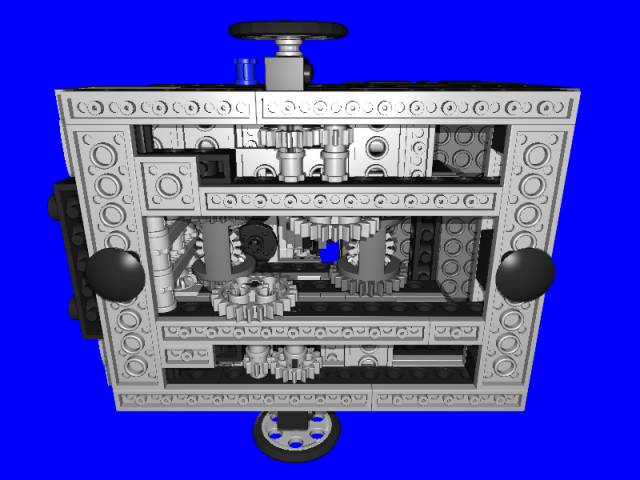
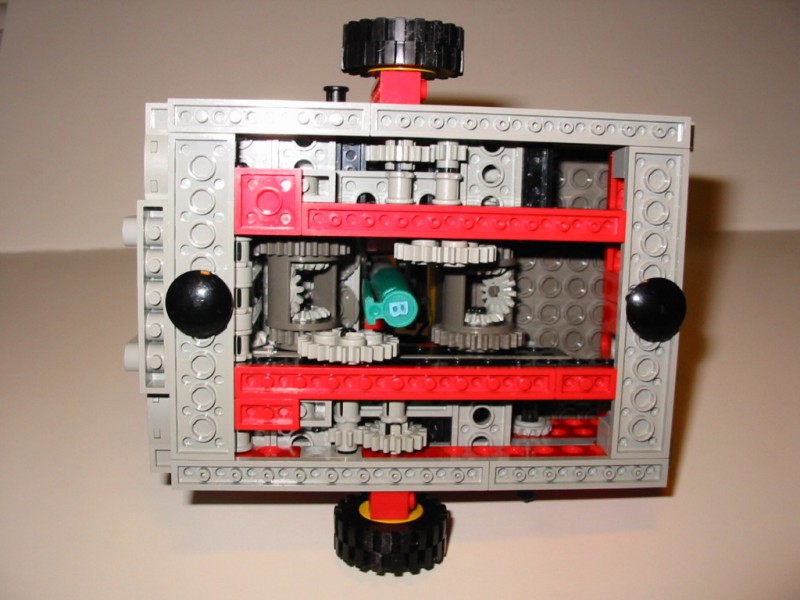
Bottom view. You can see the two differentials that make up the Adder/Subtractor. Also, notice the space between them which allows the pen to be located right in the center of the robots turning circle, which is also very important for a Turtle robot. |
|
A stripped down view of just the drive train. Now you can see the Adder/Subtractor clearly. Different from Leo's version, I used bevel gears to drive the differentials out of phase. This proved to be much simpler and more compact than a series of straight gears. |
|
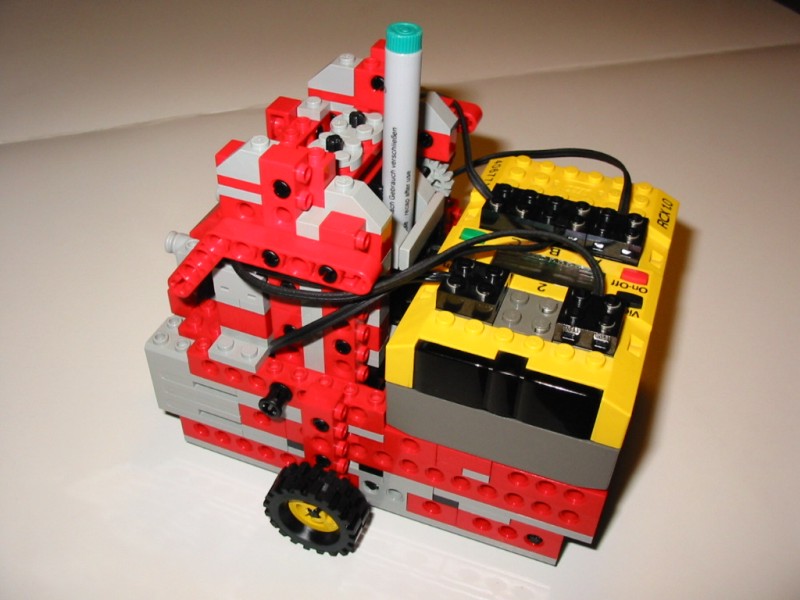
And now for the real thing! I originally built the Turtle mostly in black, but the second time around I decided to try red. I also used wider wheels, but they are the same diameter. |

|
These pictures also show the wiring for the sensors and motors. |
|
Bottom view. You can see how the pen comes through the center of the drive train. |
A lot of people have emailed me and asked me about this robot. I have made complete instructions in Ldraw, so those of you who use this program can download the instructions and build your own turtle. The turtle requires some special pieces, so you should check if you have these before trying to build it: two differentials, several 1x2 bricks with two holes, a rotation sensor, and a micro motor. You could substitute a regular gear motor for the micro motor, but would have to gear it down so it is slow enough. Please take the time to read the 'turtlenotes.txt' file I included in the download file. It has some important information in it.