 This
robot was built for a local robotics competition (Rtl8). The
task was to keep as many
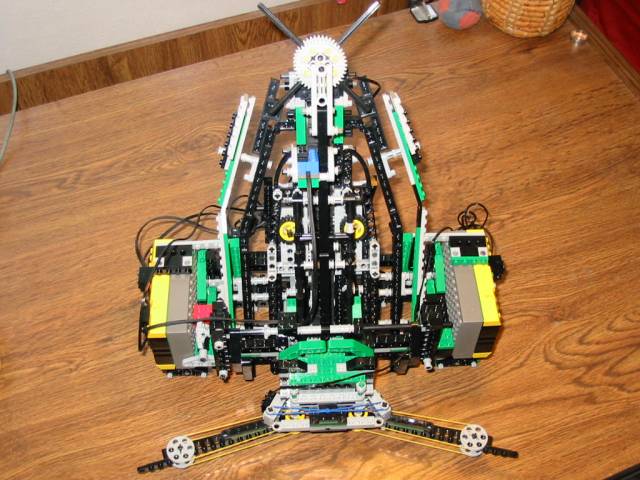
black blocks on your side of the arena, and get rid of the white blocks. I built
a way too complicated robot that was supposed to suck the blocks up with a
conveyor system, and then sort them at the top. In theory, once the robot had a
store of white and black blocks, it could dump them where necessary. The end
result? I am not a great programmer, and the mechanism took way too long to
build,
This
robot was built for a local robotics competition (Rtl8). The
task was to keep as many
black blocks on your side of the arena, and get rid of the white blocks. I built
a way too complicated robot that was supposed to suck the blocks up with a
conveyor system, and then sort them at the top. In theory, once the robot had a
store of white and black blocks, it could dump them where necessary. The end
result? I am not a great programmer, and the mechanism took way too long to
build, 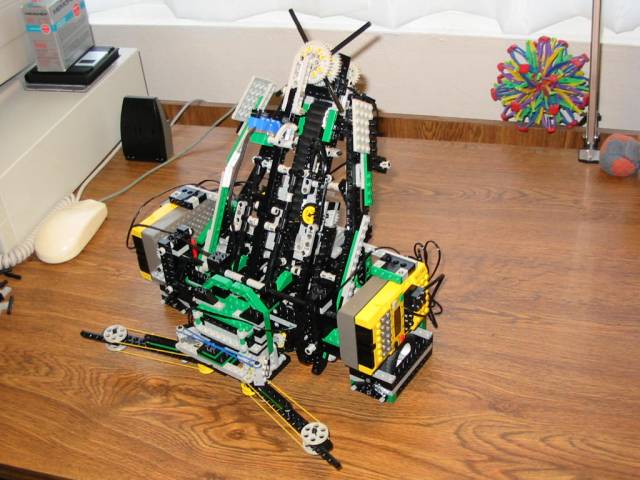 so
I couldn't get the sorting working. Rather than stress out and try to fix the
program during the competition, I just let the robot drive around and randomly
push the blocks. My navigation program worked quite well. So... By purely random chance, I ended up in second place. I really didn't like this
robot much, I thought it was ugly and unnecessarily complex. The only
thing I did like was the driving and steering mechanism. For this robot, I
really wanted to do something other than the typical skid steering. I got this
idea from three wheeled forklifts and picking machines. The rear wheel (could
have been the front) does both the driving and the steering. The other two
wheels are just passive casters. No yucky skidding here, and it can turn about
its own center!
so
I couldn't get the sorting working. Rather than stress out and try to fix the
program during the competition, I just let the robot drive around and randomly
push the blocks. My navigation program worked quite well. So... By purely random chance, I ended up in second place. I really didn't like this
robot much, I thought it was ugly and unnecessarily complex. The only
thing I did like was the driving and steering mechanism. For this robot, I
really wanted to do something other than the typical skid steering. I got this
idea from three wheeled forklifts and picking machines. The rear wheel (could
have been the front) does both the driving and the steering. The other two
wheels are just passive casters. No yucky skidding here, and it can turn about
its own center!
|
|
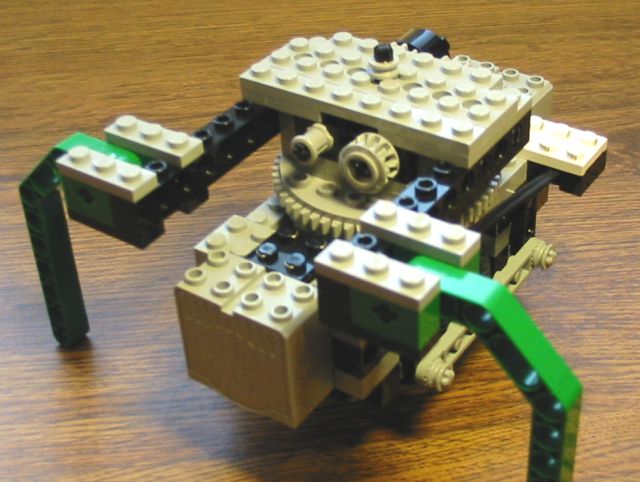
So.. here is a shot of the drive/steer mechanism on its own. Two motors drive the single wheel, and another motor steers this motors and wheel assembly. The electric plate is used to connect the two motors so that both can be run off of the same output. |
|
|
This shot shows how the wheel can turn 90 degrees. It can rotate all the way around, but the wires would get tangled. |
|
|
A closer shot of the inner workings. I used two counter rotating worm gears to drive the small 8 tooth gear which turned the wheel. The reason for this was to be able to eliminate any backlash in the gears. If the steering has any play, just pull one of the 16 tooth gears connected to the worm gear shafts off, and the turn the worm gear a bit before reconnecting the 16 tooth gear. You can make this type of gearing as tight or as loose as you want. |
|
|
Bottom view showing the drive and steer wheel. This mechanism was at the back of the robot, with two free turning wheels up front to form the three wheeled driving base. |
See Dave Koudys' pictures of the competition here