There is no way I can claim that this mechanism was entirely my idea. I must give credit to Andrew Lipson, and his similar gearbox on his page. I guess I just took his idea and extended it a bit further. Andrews gearbox used two motors: one to select between four outputs, and the other to drive the outputs. So effectively two motors become four. I wanted to figure out a way select between four outputs, and then be able to drive these outputs with the same motor. The trade off with my design is that the outputs can only be driven in one direction. with my gearbox, driving in one direction selects between the four outputs, and the other direction drives the outputs. This is fine of you want do something with cyclic motion. I should also credit Michael Powel, who came up with a nifty directional transmission using sliding worm gears. Really all I did was combine these two ideas into one mechanism. Here you can see the result.
|
|
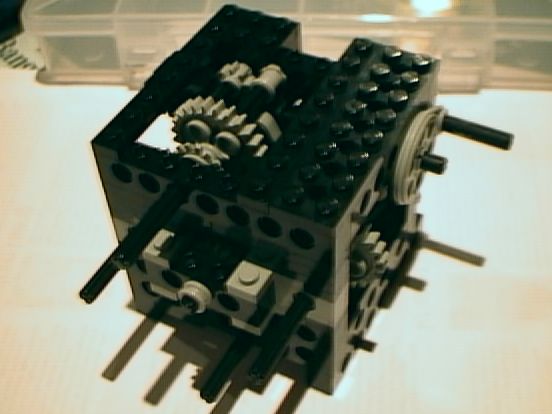
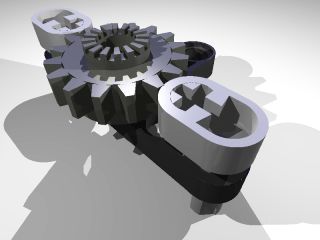
Photo of the four way driver. The input is the pulley you see at the right side. |
|
|
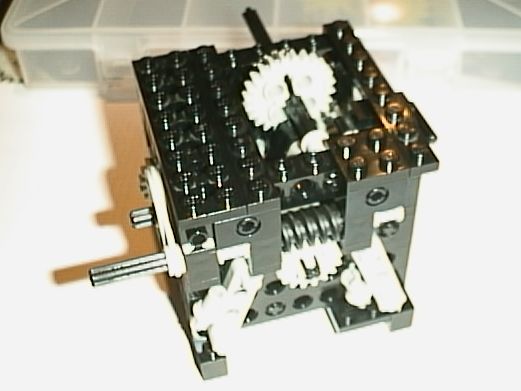
Back view. You can see the worm that drives the gear on the selector. Inside there is a sliding worm gear that turns the selector. |
|
|
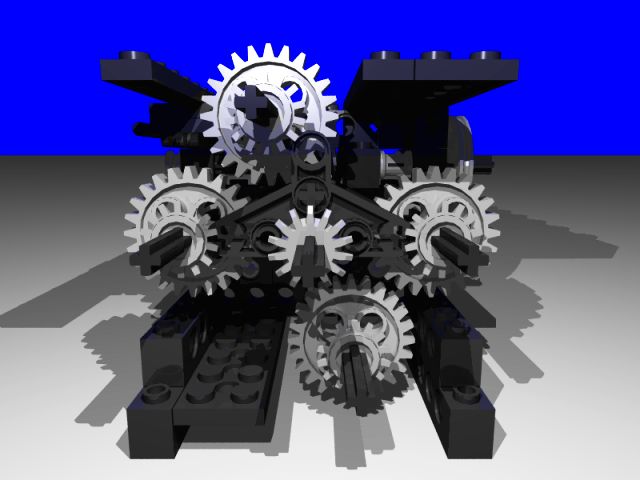
The selector. you can turn the shaft to turn the 8 tooth gear on the selector. This is what engages with and drives one of four of the output shafts. To rotate the selector into a new position, the dark grey gear at the back is turned. Notice that this gear is locked to the selector body, but not the shaft. This allows independent rotation of the selector and the driving gear. |
 |
This picture shows clearly how the dark grey gear is fixed to the triangle plate with crankshaft pieces. |
|
|
One of the output shafts. All four of them are the same. The bevel gear is only used for spacing purposes. |
|
|
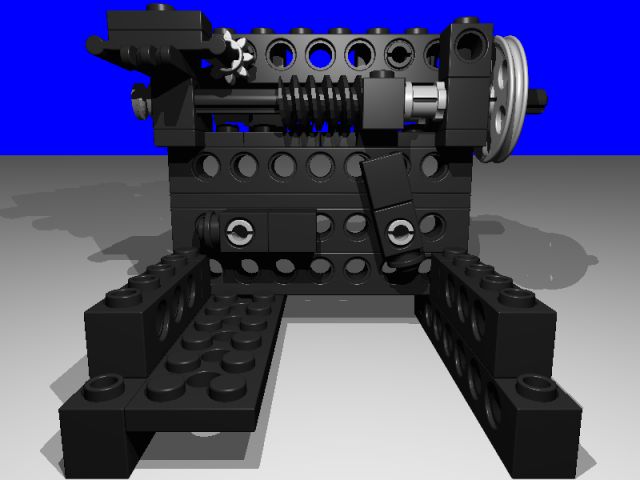
The back of the gearbox. You can see the sliding worm that makes up the directional transmission. The 8 tooth gear you see is only used to chase the worm gear back when the direction is reversed. The two 1x1 bricks on the pins are ratchets for indexing the selector. It can rotate one way but not the other. |
|
|
The inside of the gearbox, showing how it all goes together. |
Here is the operating principle behind the four way gear box. When you turn the input shaft forward, the 8 tooth gear on the selector (driving gear) turns forward. The selector itself it prevented from turning by the ratchets on the back wall. When you reverse the input shaft, the driving gear reverses, and the selector turns forward. The reason for turning the driving gear while the selector it turned into a new position is so that as it passes the output gears it will not rotate them. This is accomplished by turning the driving gear at the exact opposite rate as the selector is moving, so as the selector rotates past an output gear, the two gears simply mesh for a brief moment, but the output gears are not turned at all. Once the selector is rotated into position, and lined up with the desired output gear, turning the input shaft forward will turn the driving gear, and rotate the output gear. I have tried to make this as clear as I can, but if it makes no sense at all, and you are still curious, send me an email. It really helps to have the device in front of you to see how it works.
Want to build this model? Download the Ldraw file here.
Once I finished building this gear box I hooked up a motor and tested it out. It worked fairly well. I would say it shifts and engages properly 75% of the time. Unfortunately, the rest of the time either the sliding worm gear gets hung up, or the driving gears don't mesh properly. Because of this, I came up with another four way driver that fulfills exactly the same function, but with friction drive rather than gears (see the ideas section). I also got rid of the sliding worm gear used in the directional transmission, which was unreliable. If you need such a device (I planned on using it to control four pneumatic switches) this second version of the four way driver is much more practical. I think this is as far as I will develop this gearbox.