
This next version of the four way driver is an improvement on
the original for several reasons. First, I decided to use
rubber wheels instead of gears. This means that grinding of the gears is no
longer a problem. Second, I used a different type of mechanism for the
directional splitter. Usually a sliding worm gear is used in these devices, but
they can have problems with meshing as well. All I needed was a mechanism to
engage when driven one way, and disengage when driven the other way. I used an
arm that has its pivot on one of the shafts. The gearing on the arm will engage
as the shaft is driven forward, but will rotate just slightly out of the way
when driven in reverse. This proved to be much more reliable than the worm
gears.
|
|
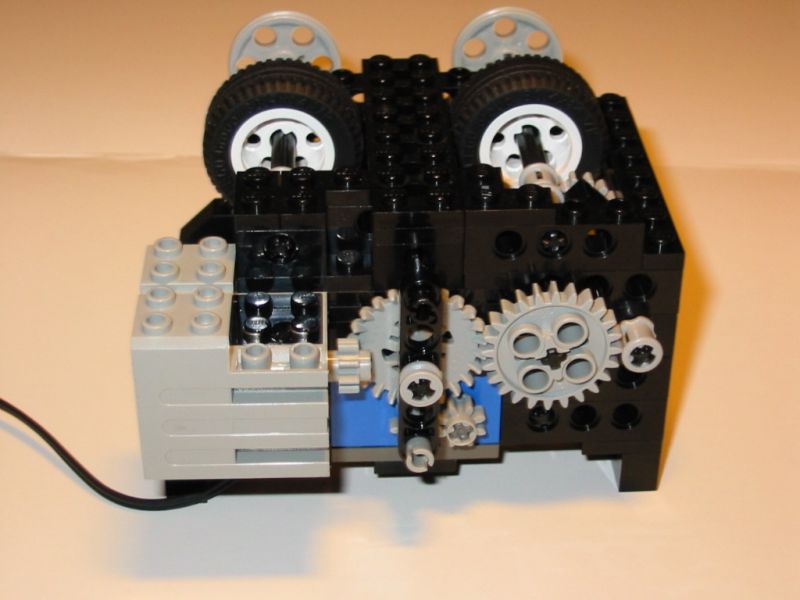
Front view. Each of the four output shafts have pulleys on them. The two grey 1x1 bricks are ratchets to allow the 24 tooth gear to rotate in only one direction. |
 |
Back view. The motor, when driven forwards will rotate the selector. When the direction is reversed, the selector stops, and whichever wheel you stopped at will be driven by means of the cylinder piece on the selector. |
 |
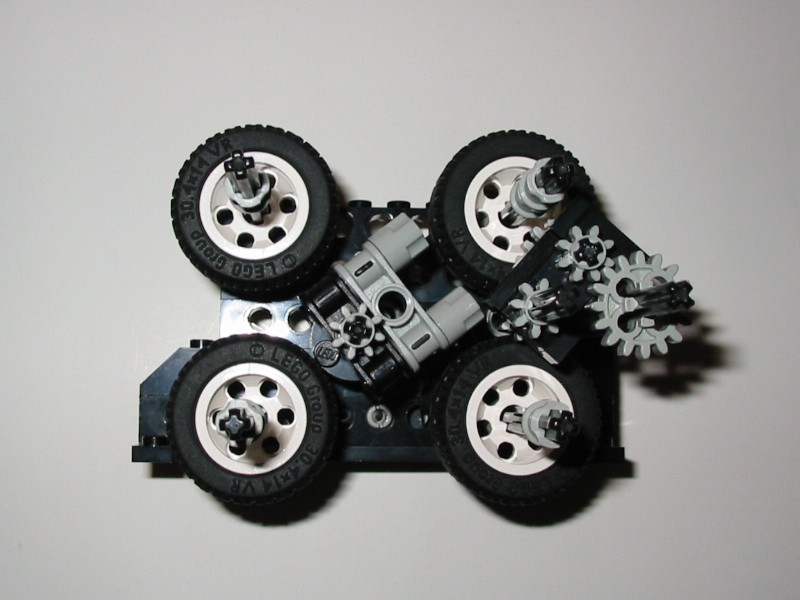
Top view of the inner workings. You can see the selector with the round 2x2 brick used to drive the rubber wheels. You can also see the arm with the gearing that flips out of the way and disengages when the motor reverses. |
 |
Selector in position for driving the bottom left wheel. |
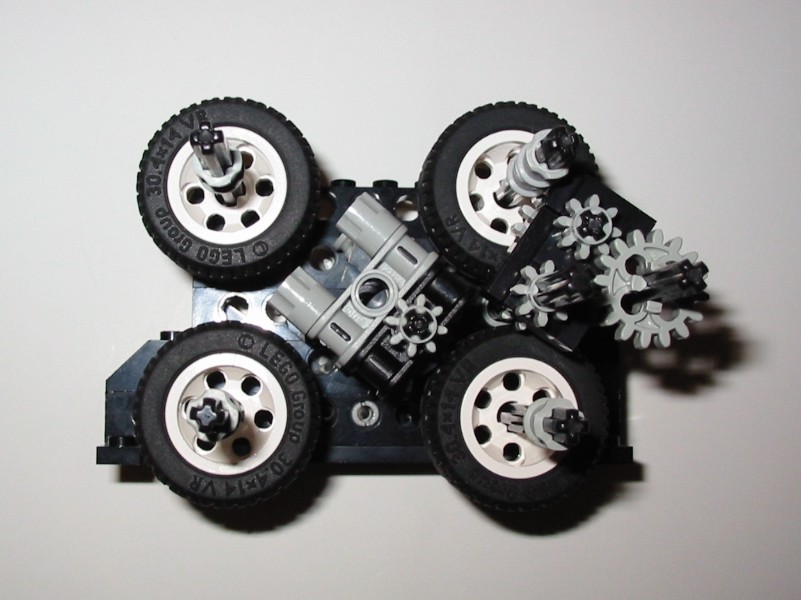 |
Selector in the next position. |
I had originally planned on using this device to control four pneumatic switches with one motor. It got quite bulky, but I did have it working with three switches. As always, these kind of devices are hard to explain without actually seeing how it works, so I got Iain to take a video of this one in action, and should get it up here soon. For now, just remember, one direction rotates the selector into a new position, the other direction drives the chosen output. So you get four single direction outputs with one motor.
