This robot was built as a study for an upcoming robotics competition. The task was to build a robot that can sort 8 blocks that are randomly placed into a defined pattern within a 4x4 grid. Before tackling the two dimensional sorter, I thought it would help to build a linear sorter for me to get a feel for the mechanics, and for my Dad to practise programming in LegOS.
|
|
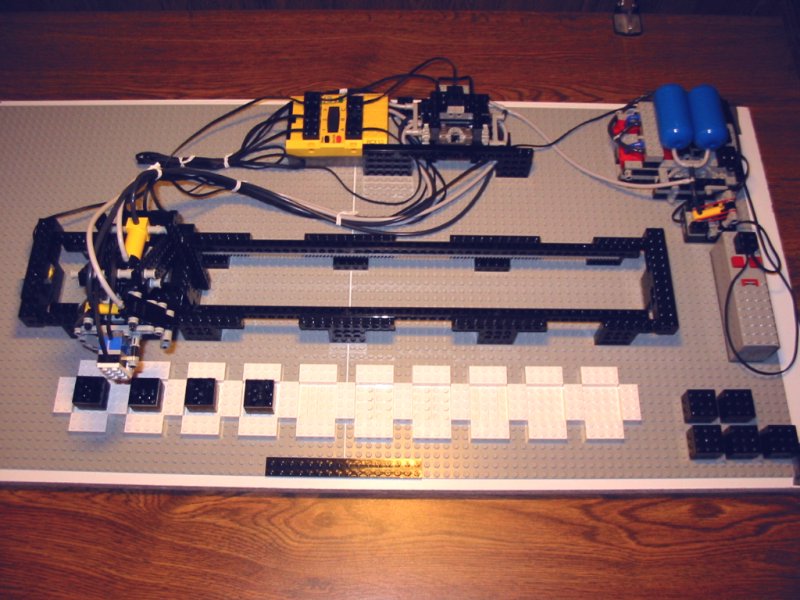
Top view. The robot could be given any number of randomly placed blocks, and sort them into a predetermined pattern. |
 |
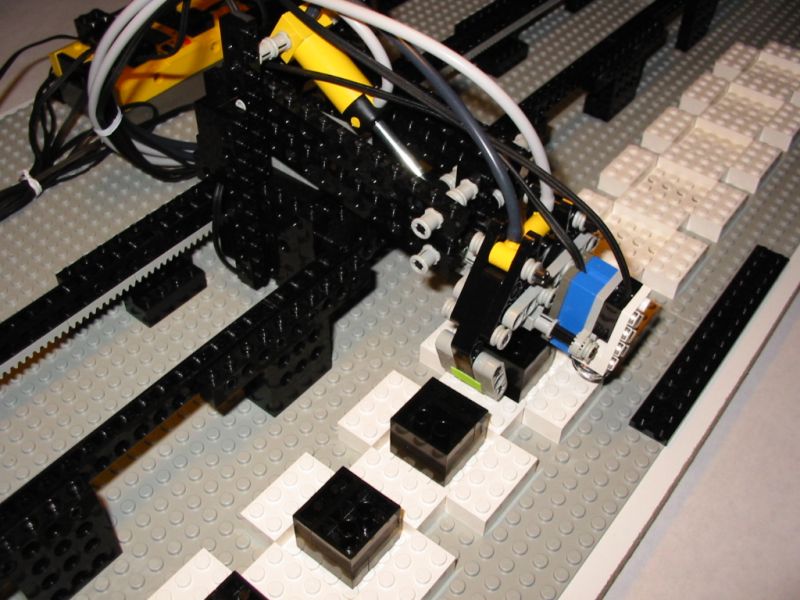
Close up of the gripper. I used pneumatics for the lift and grip movements. The light sensor is used to detect if a block is in the bin or not. I mounted the light to give more consistent readings. |
 |
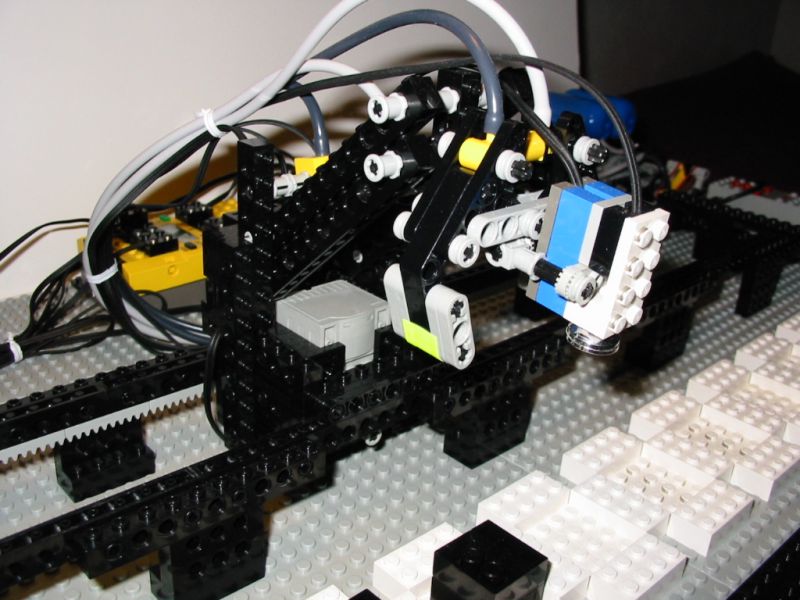
You can see the RCX and the valve switching station in the background. |
|
|
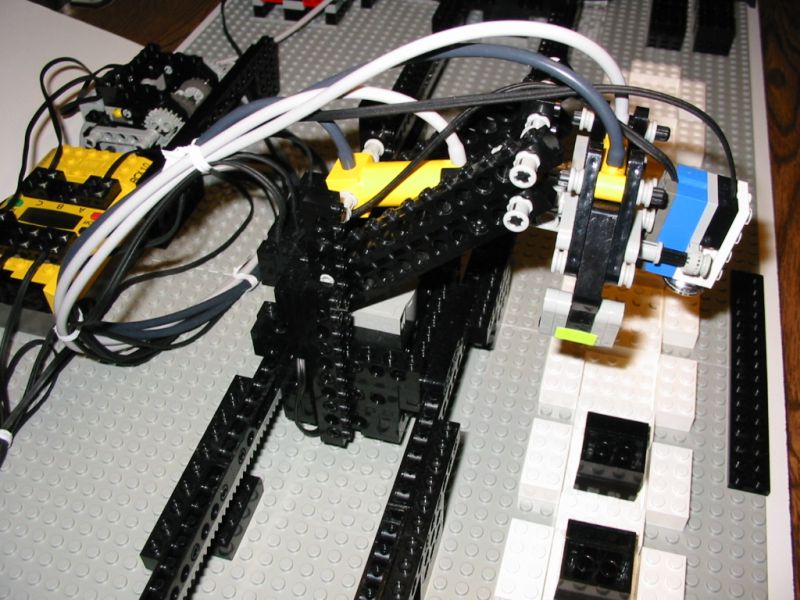
The arm in the lowered position, ready to pick up a block. |
So, what did I learn? This was my first shot at integrating pneumatics into a robot, so it was good practise. It was especially difficult to build a compressor that could keep up with the demand of the robot. You can see more about my search for the ideal compressor here. Figuring out a nice way to switch the valves wasn't too difficult. I used a motor connected to a crank attached to the valve lever. The only trick was to use touch sensors in order to accurately open and close the valve. I eventually came up with a differential based mechanism that controls two pneumatic valves with one motor, which you can see here. Another thing I learned was that the big air cylinders use a lot of air, and they move quite slowly due to friction. This was the major reason that my compressor had to work so hard to keep up. With all of this in mind, I moved on to build the real sorting robot...