I have been fascinated with pneumatics for a long time. I think it was the second or third Technic Lego set that I got as a kid that had pneumatics in it. They were the old style red cylinders. It took me a long time to figure out how the check valve worked, and how the cylinders retracted. Anyway, My latest work with pneumatics has been integrating them with robots. In order to do this, I scoured the web for ideas on motorized valves and compressors. There are a lot of neat ideas out there which helped a lot. Unfortunately, integrating Lego pneumatics requires a lot of bulky sub systems, so they don't fit well in a compact mobile robot. But, for stationary robots, this is not a problem. After a lot of building and testing and fiddling, I came up with a fairly compact single motor dual valve switcher, and a powerful compressor. I also found several interesting uses for the old red cylinders.
|
|
Here is an overhead shot of my first big compressor design. I used two motors driving four small pumps via belts. I thought a slight reduction ratio in the pulleys would give me more pressure, but they slipped far too much. You can also see a pressure switch design I stole directly from Sergei Egorov's page. It is such a nice design I didn't change it at all. |
|
|
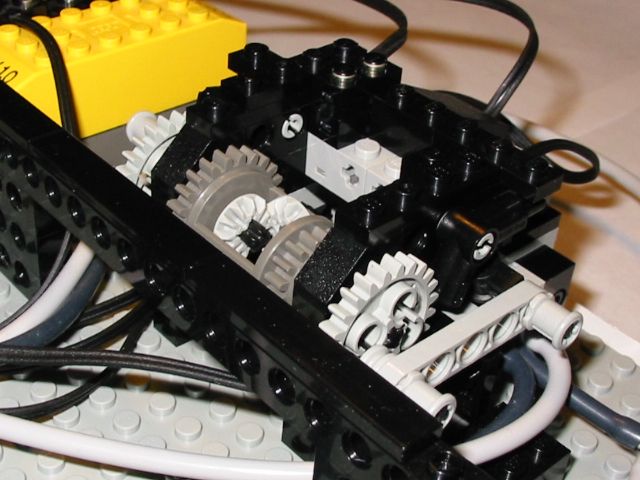
My first attempt at motorizing valves. The touch sensors get pressed halfway through the stroke, so you have a reference point. One thing I didn't like was the stroke of the crank was less then on the valve. The air wasn't restricted, but the valve never reached the "locked" position. Also, it took one motor for each valve. |
|
|
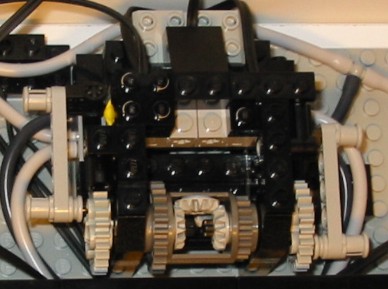
Top view of my next valve switching design. I used a differential direction splitter to get two separate functions from one motor. Driving the motor forwards operates on valve, driving it the other direction operates the other valve. |
|
|
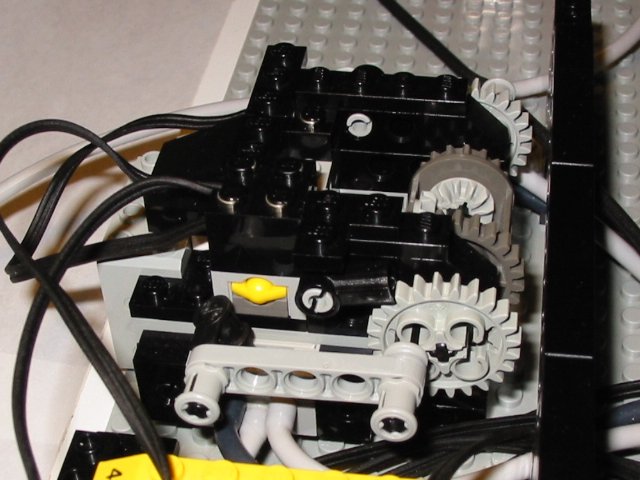
Side view. You can see I used touch sensors in the same way to track the position of the valves. You can also see the ratchet above the 24t gear. |
|
|
I changed the crank design in this version with the goal of reducing the size and getting the full stroke of the valve. The benefit of the full stroke is that the valve gets into its "locked" position, and it is much easier to stop the motor accurately on a fully open or fully closed position. |
|
|
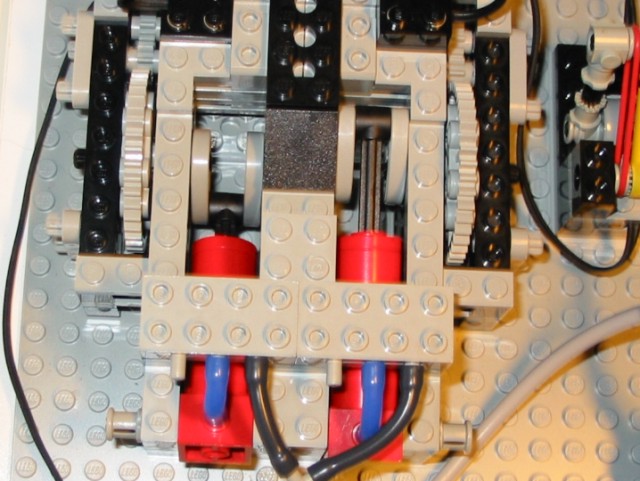
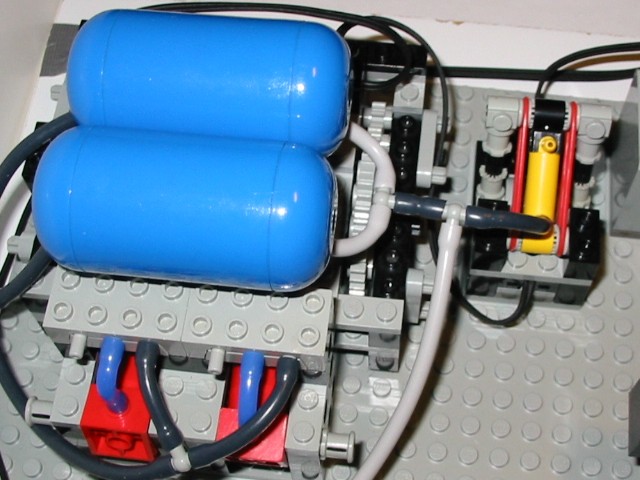
Back to compressors... Here I was trying to get the most volume possible from a Lego compressor. I used two of the old style red cylinders coupled with two of the check valve blocks. It is driven by two motors geared down 5:1. It looks better than it really was. It did provide a lot more air , but it could not produce high pressure, since the force on these larger diameter pistons was too much. |
|
|
Here the air tanks are mounted on top with the same pressure switch beside. One peculiarity of the check valves is that they squeak really loudly with every stroke. This compressor sure sounded interesting! |
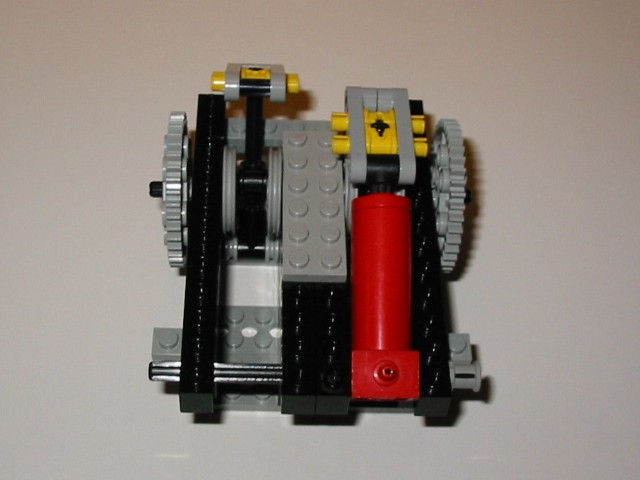 |
Here is the weirdest compressor design yet. I tried to use the quick return mechanism in a compressor. The idea was that the compressor would be more efficient if it pulled the cylinders open quickly, since this does not require much force. |
 |
The compressor is shown here with only one cylinder mounted. In theory, the idea of a quick return makes sense... but in practise, it didn't pan out. The mechanism was far too weak and relatively complex. I spent several nights trying to get this design working before giving up. |
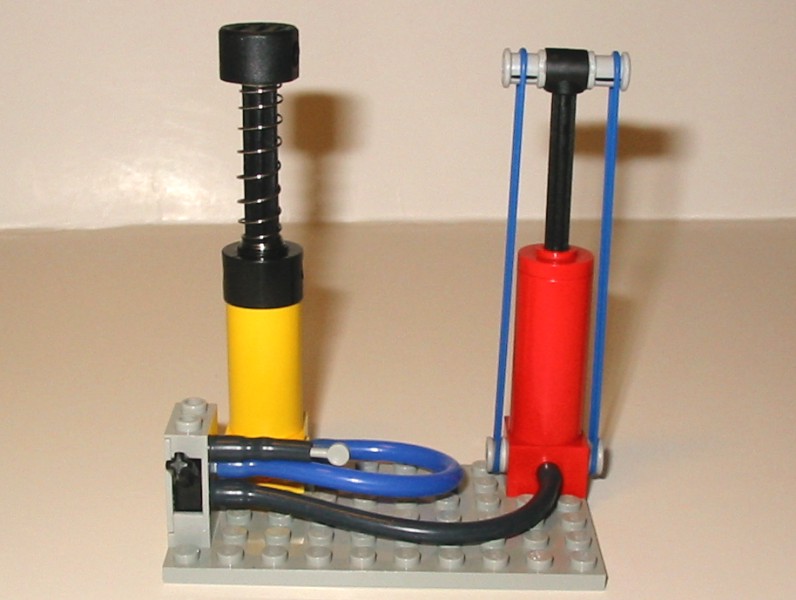 |
This picture shows one way to integrate the old single acting cylinders with the new pneumatics system. The air is pumped into the cylinder the same way, but the trick is getting the cylinder to retract when the valve is flipped. There are two problems: first, the cylinder won't retract on its own. The elastics solve this. The second problem is that the other port on the valve that is not connected to the cylinder would allow all of the air to escape when the valve is in this position. So... just plug it up! The valve has a vent, so the air inside the cylinder can escape, but the supply air is not lost. So, why bother with this weird setup? The old cylinders have less friction, and therefore move much faster. Also, a single acting cylinder with a spring return only uses half as much air. I used these properties to my advantage in my latest robot. |
| More to come... |