|
As mentioned previously, the optical axis is just an axis of
symmetry of the eye, while the visual
axis is the actual line-of-gaze. There is an angular offset between the optical and visual axes. This angular offset (angle “kappa”, κ) is subject-specific and is
determined by the displacement of the fovea from the posterior pole of the
eye. As such, it cannot be easily estimated by remote observation.
Moreover, this angle has both horizontal and vertical components in a range
of ±5°. Therefore, approximation of the PoG
by the intersection of the optical
axis with the display may result in significant, subject-dependent, gaze
estimation errors.
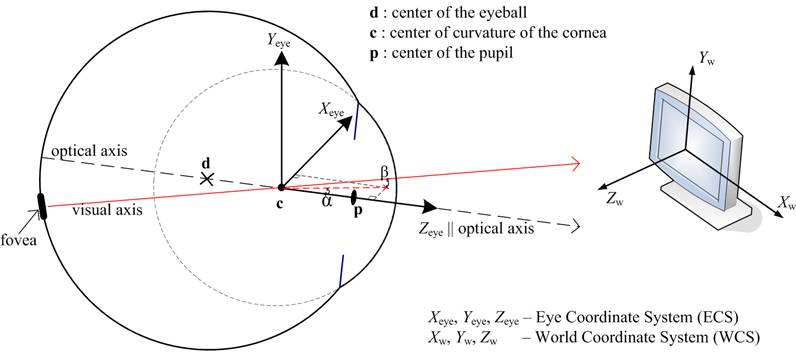
The estimation of an angle κ without explicit user
calibration is not straight-forward, though possible. First, let’s
note that κ is an angle in
3-D, therefore its orientation relative to the
stationary World Coordinate System (WCS) will change with eye rotations.
However, κ can be described
in the Eye Coordinate System (ECS) using its horizontal, α, and vertical, β, components that remain
constant despite eye rotations (see figure below).
The visual axis can be described in the ECS as a function of
unknown α and β only. Finally, the visual
axis can be translated to the WCS using a rotation matrix, R, which can be calculated based on
the orientation of the optical
axis (provided by the eye-tracker without any user calibration).
|
|
Then the unknown α and β can be estimated automatically in an iterative process.
The main idea behind it is that both eyes look at the same point in space,
therefore visual axes of both eyes intersect at the surface of the display.
An automatic calibration procedure can be completed while user looks
naturally at the display (e.g., watching a video) and no active user
participation is necessary. The automatic calibration algorithm is
described in details in this
paper.
|