
Luke Ng, M.A.Sc., Ph.D.
Candidate
Dept. of Mechanical & Mechatronics Eng. University of Waterloo
Luke Ng, M.A.Sc., Ph.D.
Candidate
Dept. of Mechanical & Mechatronics Eng. University of Waterloo
Upon
graduation, I was employed at CAE Electronics Ltd. (Montreal, Quebec) a leader
in the Flight Simulation industry. I worked as a hardware/software
engineer on the flight control systems of the Boeing 777, 767, 757,
747, 737 as well as the Canadair Regional Jet. After 2 years of
outstanding service I returned to the University of Waterloo in 1998 to pursue a Masters
Degree in Robotics.
In
spring 2000, I started a technology firm called Sinologic
Technologies Inc. Its goal was to provide the custom hardware &
middleware technologies to research and development labs such as Ford Motor Company's
Scientific Research Laboratory (Dearborn, Michigan). The focus was in
Linux-based data acqusition and control solutions. We have since
refocused to provide middleware and consulting services for autonomous
vehicle research. Please visit our corporate website for more
details.
My
current research investigates the implementation of Reinforcement
Learning to the problem of autonomous vehicle control. Our goal
is to determine methodologies which can be used so that agents can Machine Learn their own non-linear
motion controllers which will be used as the basic skills required for
coordinated driving of any automobile.
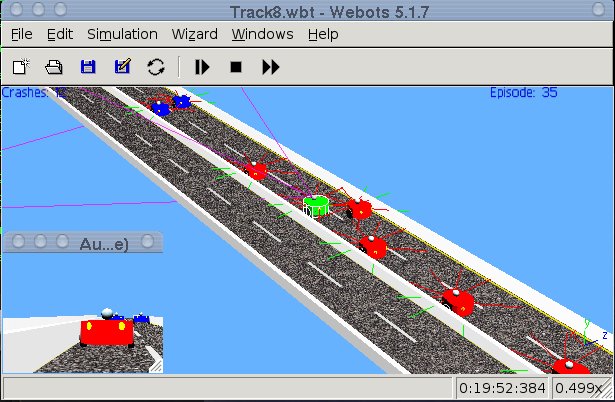
We
began this
research in early 2006 by running a pilot study using Webots 5, where we
performed Reinforcement Learning on mobile robot for collaborative
driving. To come up with a plausible solution for automotive
control, extensive
automotive modeling is required. Recently we have built a
detailed vehicle dynamics model for a generic automobile. This
model is then used in the reinforcment learning process and controller
evalution.
In
2001, I received my M.A.Sc. from the Department of Mechanical Engineering of the University
of Waterloo under the supervison of Prof.
Jan P. Huissoon. My thesis involved the design and construction of
a
distributed network of industrial robots for autonomous vision-based
welding called (DROID).
In
2002, I began my doctoral studies at the University of Toronto's Institute
of Aerospace (UTIAS) under the supervision of Prof. G.M.T.
D'Eleuterio with the Space Robotics Group in the area of mobile
robotics for space exploration. Due to supervision problems, I
transferred my studies to the University of Waterloo in December 2005.
In
2008, I recieved my Ph.D. from the Department of Mechanical and
Mechatronics Enginnering at University of Waterloo under the
supervision of Prof. Jan P.
Huissoon. My thesis is titled "Reinforcement Learning of
Dynamic Collaborative Driving" and will be completed in April
2008. The research uses a relatively new machine learning
technique called Reinforcement
Learning to derive non-linear control systems for the autonomous
vehicle control for Dynamic
Collaborative Driving (an automated driving approach).
This research brings together the topics of Artificial
Intelligence (AI), Vehicle Dynamics Modeling and Non-Linear
Control. This project is funded by the Auto 21 Network Centres of
Excellence program.
Currently,
I am teaching GENE 121: Introduction to Digital Computation at the
University of Waterloo. I will be pursuing post doctoral work at Defense Research and Development Canada (DRDC-Ottawa)
in the area of Unmanned Air Vehicles, this research will
allow me to investigate
machine learning approaches to controlling autonomous flight.
Refereed Journal Publications:
Ng, L., Clark, C.M., Huissoon, J.P. "Reinforcement Learning of Dynamic Collaborative Driving. II: Lateral Adaptive Control ." In International Journal of Vehicle Information and Communication Systems. Inderscience Ltd. 2008. (In Press)
Ng, L., Clark, C.M., Huissoon, J.P. "Reinforcement Learning of Dynamic Collaborative Driving. I: Longitudinal Adaptive Control ." In International Journal of Vehicle Information and Communication Systems. Inderscience Ltd. 2008. (In Press)
Refereed
Conference Papers:
Ng, L.,
Clark,
C.M., Huissoon, J.P. "Reinforcement Learning of Adaptive Longitudinal
Vehicle Control for Dynamic Collaborative Driving." 2008 IEEE Inteligent Vehicles
Symposium (IV'08), Eindhoven, The Netherlands, 2008. (In Press)
Dao, T.S., Ng, L., Clark,
C.M., Huissoon, J.P. "Realtime Experiments in Markov-Based Lane
Position Estimation Using Wireless Ad-Hoc Network." 2008 IEEE Inteligent Vehicles Symposium
(IV'08), Eindhoven, The Netherlands, 2008. (In Press)
Ng, L., Clark,
C.M., Huissoon,
J.P.,
D'Eleuterio G.M.T., "A Decentralized Reinforcement
Learning Controller for Collaborative Driving." In Proceedings of 1st IFAC Workshop on
Multi-Vehicle Systems 2006 MVS ’06. Oct 2-3, Salvador, Bahia,
Brazil, 2006. [pdf]
Refereed
Abstract Conference Presentations:
Ng, L., Chris, C., Huissoon, J.P., "Combine Lateral and
Longitudinal Vehicle Control Using Reinforcement Learning for Dynamic
Collaborative Driving", 2007 ITS Canada Annual Conference,
Niagara Falls, Ontario, Canada, 2000. [pdf]
Ng, L.,
Huissoon, J.P., "A Distributed Multi-Robotic Environment for Flexible
Manufacturing", In Proceedings of the 31st International Symposium
on Robotics (ISR 2000), p 194-5, 2000. [pdf]
Theses:
Ng, L. "Reinforcement Learning for Dynamic Collaborative
Driving." Ph.D. Thesis, Department of Mechanical and Mechatronics
Engineering, University of Waterloo, 2008. (In Review)
Ng, L. "A
Distributed Robot of Intelligent Devices (DROID): Conception, Design,
and Implementation for Autonomous Multiple Robotic Welding." M.A.Sc.
Thesis, Department of Mechanical Engineering, University of Waterloo,
2001. [pdf]
Poster
Presentations:
Huissoon J.P., Michaud F., Clark C.M., Dao T.S., Leung K.,
Ng, L.
"Dynamic Collaborative Driving F206-FCD." Auto 21 Annual HQP 2007 Conference,
Windsor, Ontario, Canada 2007. [pdf]
Huissoon J.P., Clark C.M., Dao T.S., Leung K., Ng, L.
"Dynamic Collaborative Driving F206-FCD." Auto 21 Annual HQP 2006 Conference,
Barrie, Ontario, Canada 2006. [pdf]

From
May 1998 to April 2001, I pursued my Masters Degree at the University of
Waterloo, Dept. of Mechanical Engineering under the
supervision of Prof. Jan P. Huissoon in the Controls
and
Automation Group. My thesis investigated the problem of using
ethernet
as a means of linking up several robots in order to perform as a
coordinated robotic work-cell. This research allowed me to learn
and program various aspects of robotics such as low-level robot control
(Reis Robot), motion
control (Delta Tau), computer
vision (MVS, Dalsa/Coreco), computer networks, and
real-time
programming (QNX).
From
January 2002 to December 2005, I pursued my Doctoral studies at the University of
Toronto's Institute for Aerospace Studies (UTIAS) under the
supervision of Prof. GM.T. D'Eleuterio. During my time at UTIAS,
I researched various aspects of mobile robotics such as computer
vision, navigation, radio-localization, artificial intelligence and
multi-robot control.
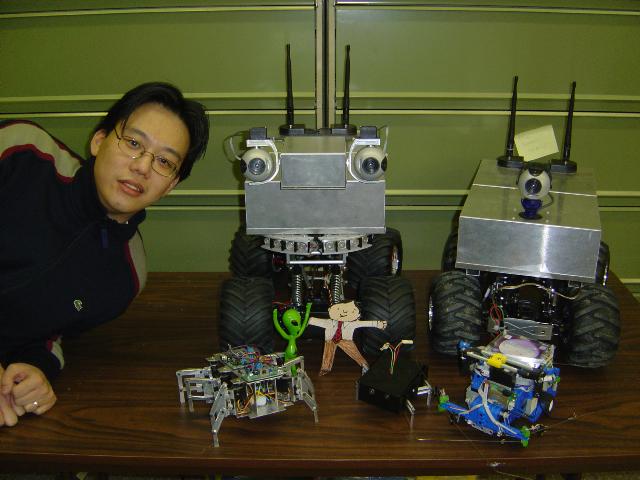
As
a member of the Space Robotics research group, I participated in the
design and construction of 10 rovers which were used
for mobile robotics experiments. I was the
software lead for this aspect of our group's research. My
responsibilities included hardware integration, custom software
development,
device drivers, network infrastructure and communication,
computer vision and operating system support (LINUX). A few of our
rovers were used by other institutions and
corporations for research and development purposes, these include: MDA Space Systems,
Neptec Design Group,
and York University.

Jan 17, 2002: Prescreen of Cyberman
Steve Mann, James Fung, Corey Manders, Luke Ng, Chris Aimone.

March 28, 2002: Dusting at Robarts
Andrej Marjan; Meier Robert James; Luke Ng; Steve Mann (ECE1766 Prof.); Brandon Niblett; Marcin Michalik
Courses
During the course of my studies at UTIAS, I had the priviledge of studying under some very renowned professors at the University of Toronto including Prof. Steve Mann, (Wearable Computing) Prof. J.D. Deslaurier (Design of Remote Air Vehicles), Prof. Robert Zee (Microsatellite Design), and Prof. Stefan. Mochnacki (Astrophysical Techniques). Below are some fun pictures taken during my course with Prof. Mann.